Tiny features have a way of becoming expensive the moment they leave a developer laptop and land on hardware that has 64MB of RAM, a cranky watchdog, and no patience for bloat.
That’s where the smaller OpenClaw builds start to matter.
There are lean, stripped-down OpenClaw variants that reportedly live in roughly ~10MB of memory. Not “10MB on top of everything else.” Not “10MB once the process settles.” Just something close to 10MB to be alive at all.
And what makes it interesting is that this isn’t a single approach. It’s three different cuts at the same problem: Picoclaw, Zeroclaw, and Nanobot — each one trying to answer the same question with a slightly different philosophy.
That tradeoff is the real story.
You want enough capability to ship something useful. Your target environment wants the exact opposite: fewer dependencies, less memory overhead, smaller binaries, and no surprises at runtime.
So before getting into which variant does what, I want to show the measurement setup I use to compare memory usage across builds. Because in real-world systems, “10MB RAM” is rarely a clean number. It changes depending on whether you’re counting startup state, steady-state residency, mapped pages, allocator slack, or the memory your tooling quietly burns in the background.
Why these edge-friendly builds deserve more attention
For years, a lot of AI software has been designed around a comfortable assumption set:
- plenty of memory
- a GPU nearby, or at least a generous CPU budget
- large runtimes with thick dependency graphs
- container-heavy deployment paths
- monitoring layers that are sometimes fatter than the model they’re watching
That worldview is starting to break.
- Deployment reality: teams want AI capabilities in places that were never built for heavyweight stacks — embedded systems, edge boxes, internal utilities, kiosks, customer-managed environments, low-cost instances, and background workers with hard limits.
- Cost reality: RAM is not just a technical constraint; it is a billing line. In multi-tenant systems, serverless jobs, and high-scale worker fleets, memory overhead compounds fast.
- Operations reality: memory pressure is one of the least glamorous and most persistent ways systems fail. OOM kills, fragmentation, creeping leaks, and misleading local benchmarks all turn into production pain.
So when I read minimum ~10MB RAM attached to optimized OpenClaw variants, I don’t just see a spec line. I see a signal:
The default stack was too heavy, and someone decided to do the hard engineering instead of pretending hardware would save them.
That matters even if you never plan to deploy on a tiny edge device.
Because the discipline required to squeeze a system into a memory envelope that small often creates software that is:
- cheaper to operate
- quicker to start
- more resilient under pressure
- simpler to understand when something breaks
Not universally. But often enough to pay attention.
Light-weight Variants of OpenClaw
There are three light-weight optimized variants of OpenClaw that use minimum ~10MB of RAM
- Picoclaw
- Zeroclaw
- Nanobot
And if you want the repositories, here they are:
Three variants implies optimization is not one trick
If this were a single lite repo, I’d assume it’s mostly pruning and compilation flags.
But three separate light-weight variants suggests:
- different tradeoffs were made
- different constraints were prioritized
- maybe different target environments exist (even if we don’t know which ones)
In other words: memory optimization is a design space.
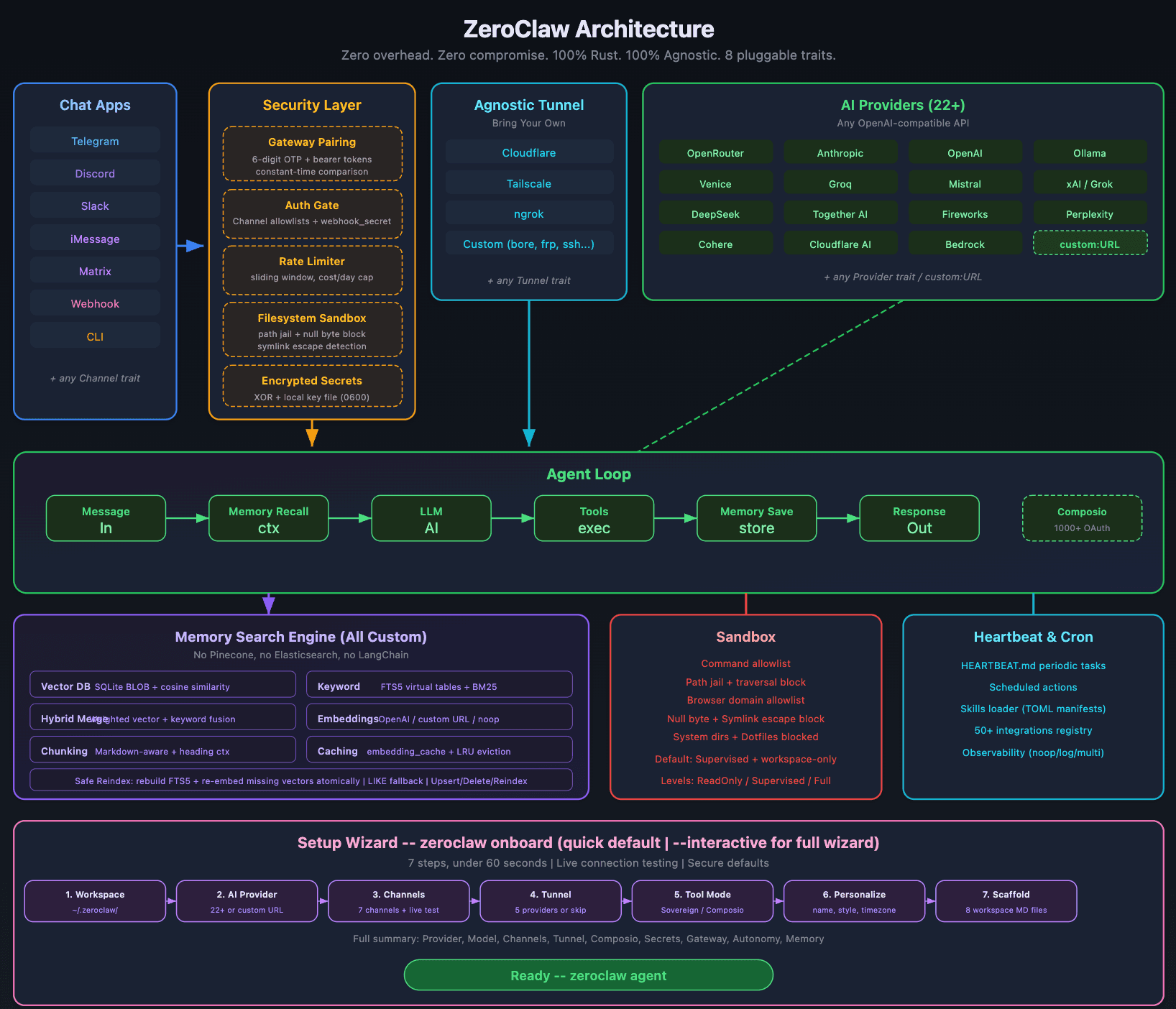
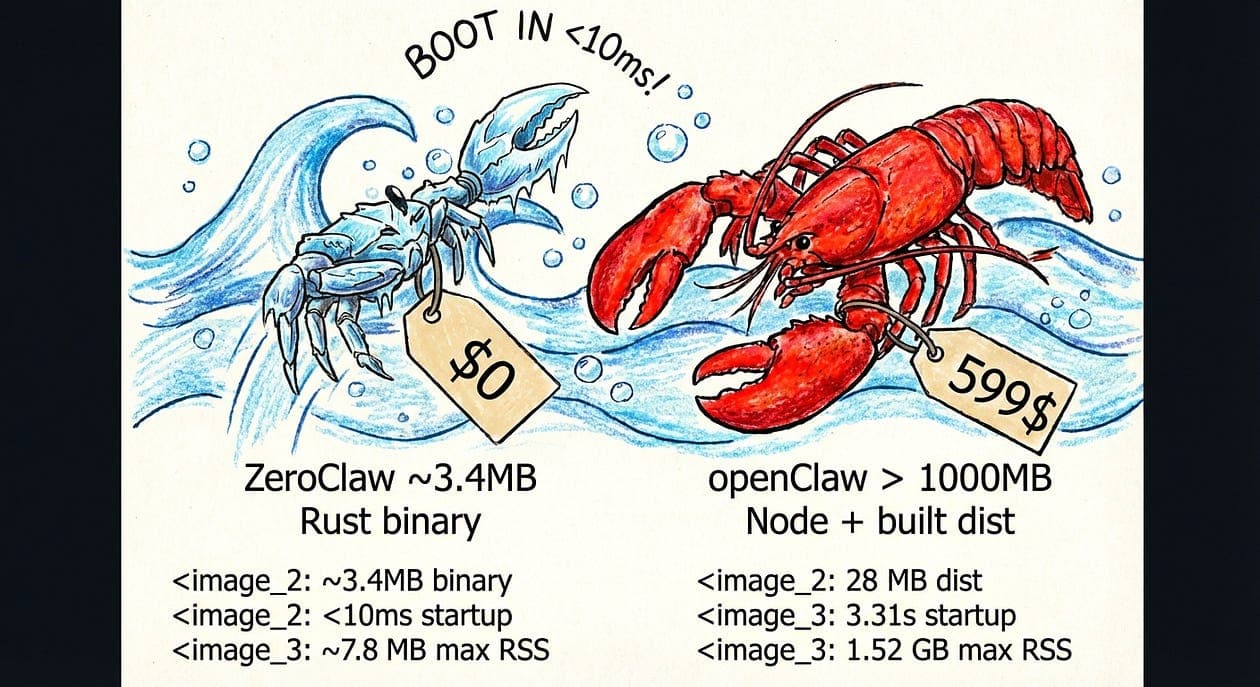
Here’s a quick look at Zeroclaw’s architecture
If you there are three optimized variants, it’s usually because:
- upstream dependencies are too large
- default runtime behavior is too memory-hungry
- or the baseline architecture wasn’t designed for constrained environments
10MB thinking or lower memory variants force you to confront the parts of AI engineering usually ignore until production burns you:
- hidden runtime overhead
- incidental memory allocations
- caching defaults
- tokenization/serialization bloat
- logging and tracing payloads
- concurrency multipliers
- and the classic: “we load it once per request”
Here are three concrete scenarios where lightweight variants matter immediately.
(1) You’re shipping an AI sidecar in a multi-tenant environment
You run one instance per customer, per namespace, per node.
A 10–50MB footprint becomes “we can actually scale this sanely.”
(2) Your cold starts are killing UX
In serverless or autoscaling, memory footprint is tightly coupled with:
- startup time
- container image size (often correlated)
- time-to-first-token/time-to-first-response
(3) You want AI features on constrained customer hardware
Routers. Industrial PCs. Thin VMs. “Bring-your-own-infra” deployments. Air-gapped environments.
Even if you can ask customers to allocate more RAM, doing so is a tax:
- procurement delays
- higher price points
- more failure modes
How to evaluate
I’m choosing based on:
- measured memory behavior
- failure modes under pressure
- operational fit
- maintainability risk
Here’s a minimal harness I use to compare memory footprints across binaries or scripts.
Step 1: Measure peak RSS and runtime (Linux)
#!/usr/bin/env bash
set -euo pipefail
CMD="${1:?Usage: bench_mem.sh '<command to run>'}
/usr/bin/time -v prints "Maximum resident set size (kbytes)"
/usr/bin/time -v bash -lc "$CMD" 2>&1 | tee /tmp/mem_bench.out
echo
echo "---- Extract ----"
grep -E "Maximum resident set size|Elapsed" /tmp/mem_bench.out || true"
Usage examples (you’ll replace the commands with how each variant runs in your environment):
./bench_mem.sh "./picoclaw --help"
./bench_mem.sh "./zeroclaw --version"
./bench_mem.sh "./nanobot --help"
Step 2: Enforce a memory ceiling to reveal cliffs early
This is my favorite trick because it surfaces pathological allocations fast:
Limit virtual memory to ~20MB (value is KB)
ulimit -v 20480 ./your_command_here
This isn’t a perfect model of RSS (virtual memory limits are blunt), but it’s a fast way to see:
- does the system fail gracefully?
- or does it crash mid-flight with unclear errors?
Step 3: Test concurrency multipliers
Even if the baseline is ~10MB, your real footprint is often:
baseline + (buffer_per_request × in_flight_requests)
So I run something like:
for c in 1 2 4 8 16; do echo "=== concurrency=$c ===" ./bench_mem.sh "./your_service --concurrency $c --run-sample-workload" done
If you want a lightweight AI component to survive production, here’s what I check.
Memory behavior
- Peak RSS measured under representative load
- Memory stable over time (no slow leaks across minutes/hours)
- Caches have explicit size limits (no “unbounded until OOM”)
- Concurrency scaling understood and tested
Operational behavior
- Fails gracefully under memory pressure (clear errors, no corruption)
- Startup cost measured (cold start matters)
- Logging/tracing can be tuned down without code changes
- No hidden background threads that allocate unpredictably
Product risk
- Active maintenance signals (issues, commits, releases)
- Clear licensing and ownership alignment
- Integration surface matches your stack (CLI, library, service)
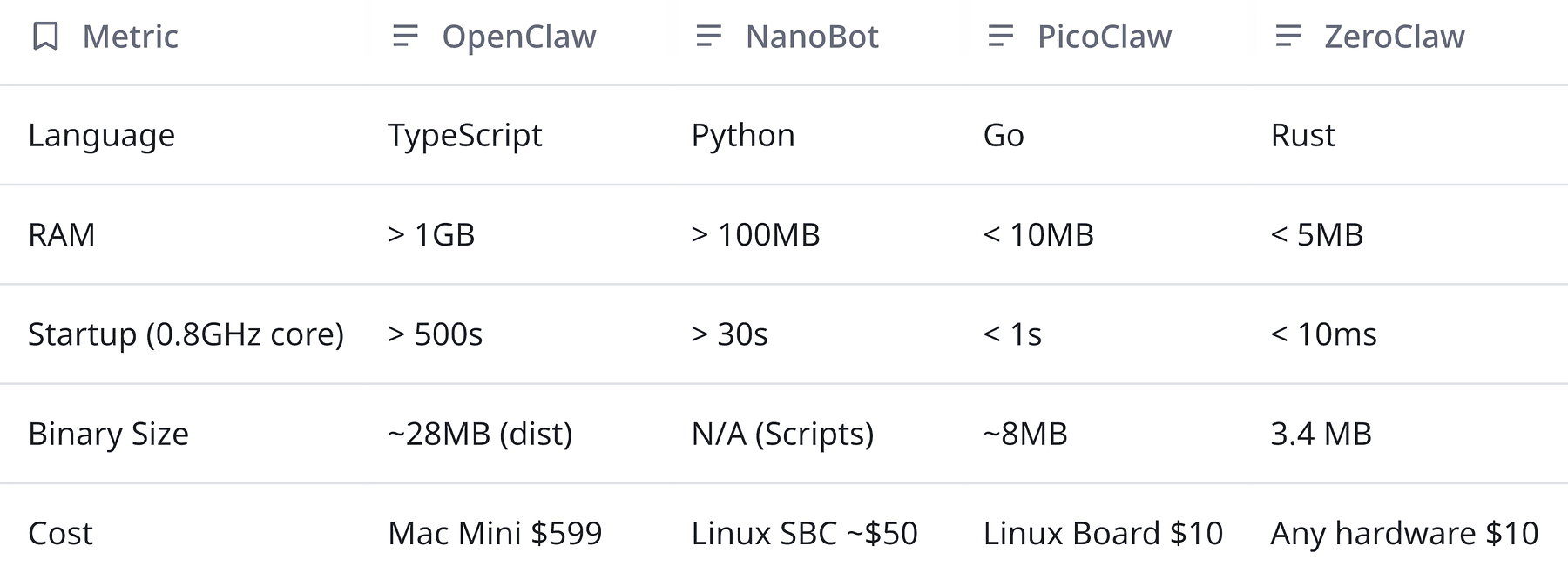
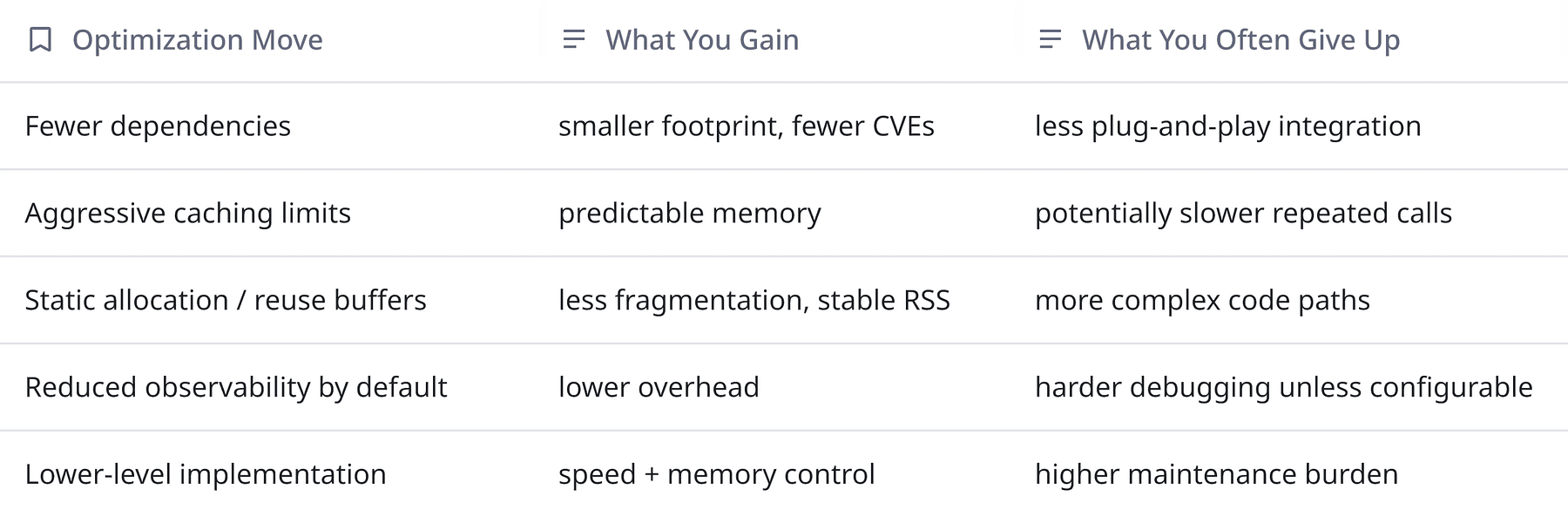
A tiny table of tradeoffs
This is general background knowledge and applies to most “lite” variants:
So… which of the three should you pick?
I can tell you how I’d frame the decision in a way that respects both engineering reality and product needs.
1) Decide what “Openclaw compatibility” actually means for you
Open question:
- Do you need drop-in API compatibility with baseline Openclaw?
- Or do you just need the capability in a smaller envelope?
2) Decide what kind of system you’re building
- Embedded-ish? You care about deterministic memory and predictable failure modes.
- Multi-tenant service? You care about per-instance overhead and concurrency scaling.
- Client-side app? You care about startup cost, battery, and background memory.
3) Treat the three variants as a portfolio, not a beauty contest
The most product-minded move might be:
- prototype with two of them
- run the same harness
- measure memory + latency + failure modes
- and pick the one that fits your constraints today
Then keep the others on your radar as contingency options.
My slightly opinionated take
If you’ve never shipped into tight memory budgets, it’s tempting to optimize last.
Once your architecture depends on a heavyweight runtime, your product roadmap starts inheriting infra requirements:
- larger nodes
- fewer deployment targets
- more operational fragility
- more cost to scale
- and more “it works in staging” lies
So when I see three independent lightweight variants clustered around a ~10MB floor, I see a community (or ecosystem) converging on a truth:
The default stack is too fat for where people want to ship next.
Even if OpenClaw itself is something totally different than what I’m imagining, the pattern is stable: constraints drive innovation and the best product teams make those constraints explicit early.
Concluding thoughts
You don’t need to be building for microcontrollers to care about memory discipline.
If you’re building AI features that need to run everywhere, these three OpenClaw variants are worth looking at.
And if you’re not in that world yet? You will be. Product always wants one more surface area.